Official Robotics Society of Tor Vergata University of Rome
Follow our
projects and support us on Facebook. Stay tuned!
Four stunning projects
TorVergata House Of Robotics
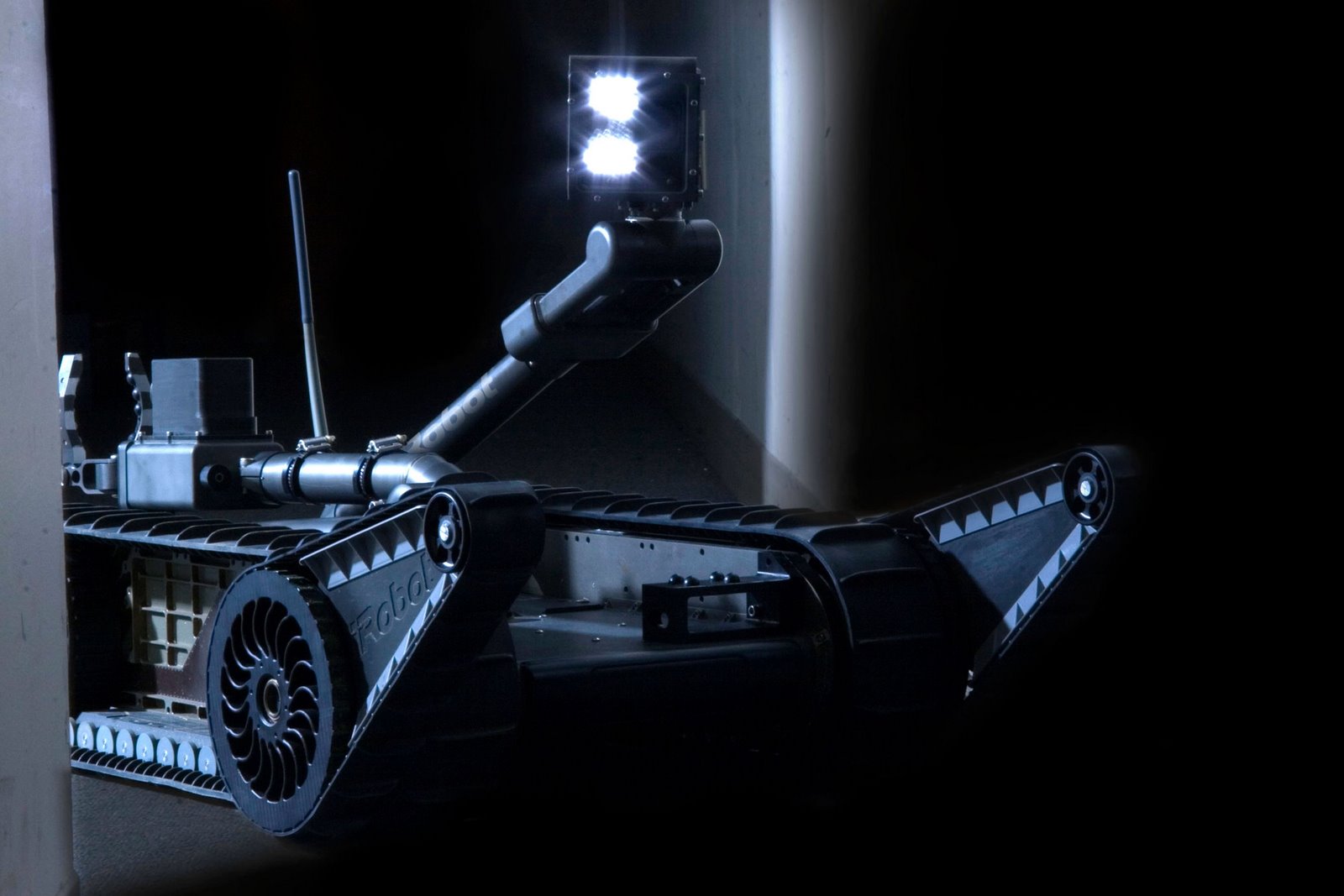
Rescue Rover
Semi autonomous rover. Real time environment mapping, obstacle detection and avoidance.
- ROS-based and Linux environment
- Real Time mapping
- Position control and trajectory tracking
- Obstacle detection with Kinect

Quadcopter Control
Autonomous quadcopter capable of vertical take off, landing and 3d reference tracking.
- Nonlinear system model
- Optimal Kalman Filter
- Arduino Compatible
- Raspberry Pi Compatible
- Pid and LQ regulator
3D Printer
- Chassis realization
- Stepper motors set up and control
- Firmware implementation
- Arduino compatible
Anthropomorphic Robotic Arm
Realization and control of robotic arm using 3D printed components and direct and inverse kinematic theory.
- 3D modelling with SolidWorks
- Motors and encoders installation
- Firmware development
- Arduino compatible