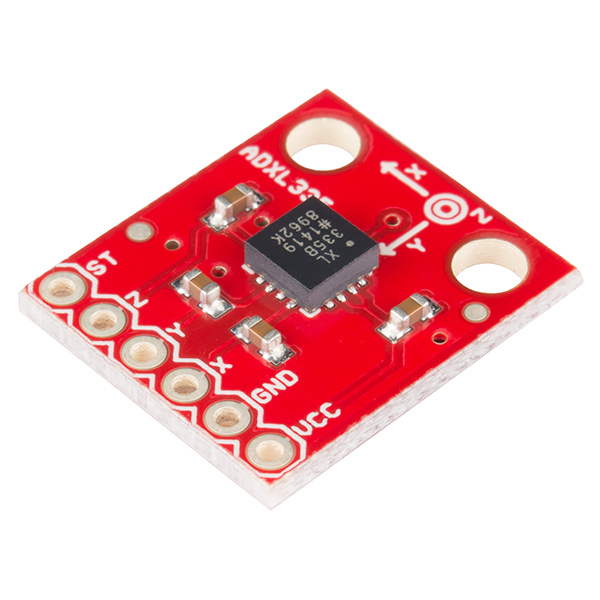
We have already used an accelerometer in a previous post. This time we have an analog 3-axis accelerometer, ADXL335, which can be used to estimate the orientation along the x,y and z axis. There are several websites that talk about this sensor. We won’t repeat any of the informations you can find elsewhere, this post contains content that we haven’t found on the web and that’s the reason why an exhaustive step by step tutorial is needed.
As stated in the previous tutorial about the MMA7268Q, a common problem with accelerometers is filtering noise out from readings. We will talk about this another post.
What will you get
What you will need
To measure acceleration data the following parts are required:
- An Arduino Uno(20€)
- Triple Axis Accelerometer Breakout – ADXL335 from SparkFun (15€)
- Male pin headers. This kit may be useful.
- A Breadboard (5€)
- M/M jumpers (4€)
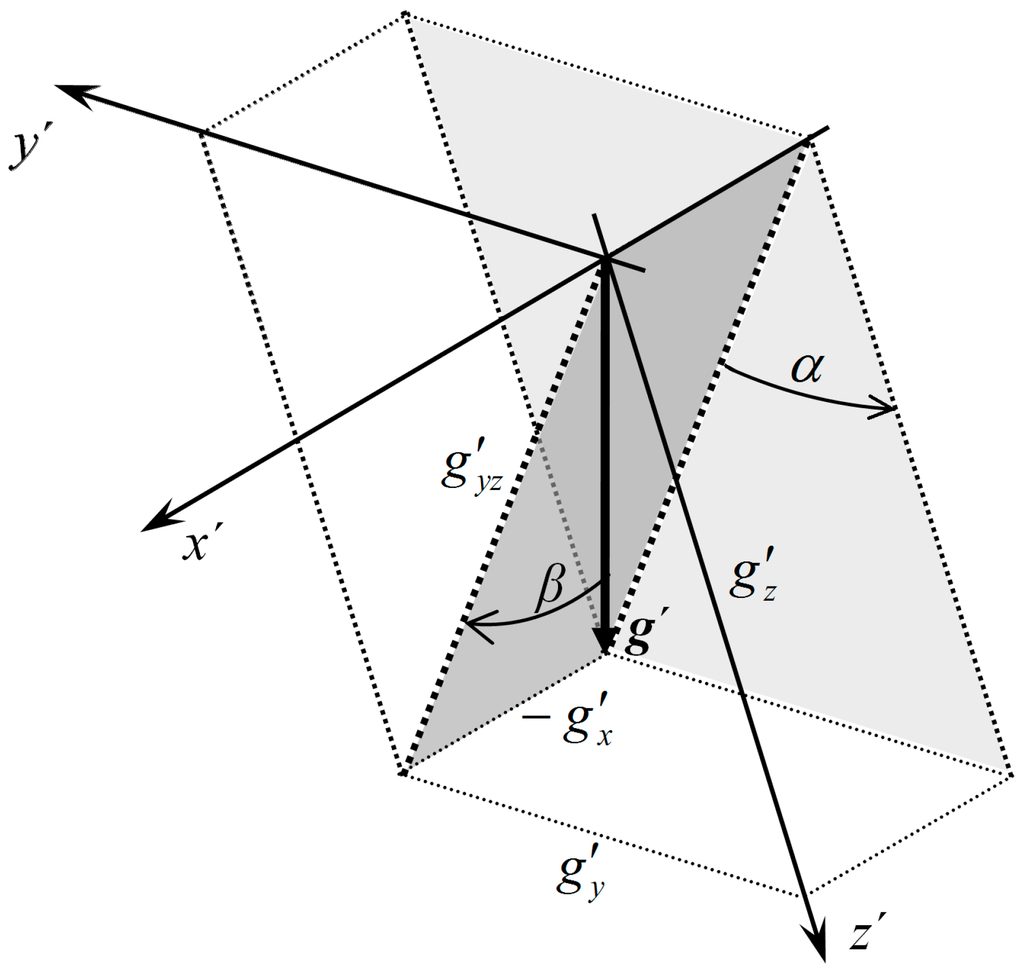
In the next pages we will use the Gravitational acceleration to calibrate the sensor and determine the accelerations along the three axis expressed in g.

![Matlab Arduino – Setup a serial communication [Quick]](http://www.userk.co.uk/wp-content/uploads/2015/07/Portrait-500x383.png)
{kind=link}
{kind=link}
{kind=link}
{kind=link}