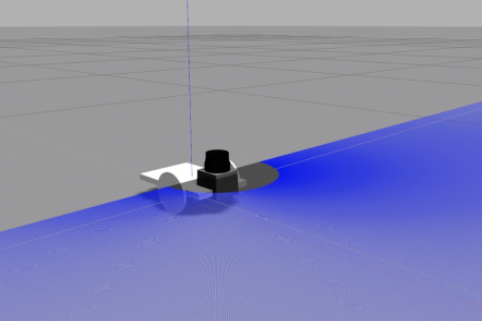
Ros – Laserscanner with Kinect
roscore roslaunch openni_launch openni.launch rosrun rviz rviz Set the RViz options for Fixed Frame (at the top of the Displays panel under Global Options) to camera_link. On the left-hand side of the RViz panel, click on the Add button and choose the PointCloud2 display option. Set its topic to /camera/depth/points. Change Color Transformer of PointCloud2

